Servomotore Yaskawa Electric InsB 200V SJME-04AMB41-0Y 400W Servomotore Industriale
Specifiche
Corrente: 2.0A
Tensione: 200V
Potenza: 400W
Coppia nominale: 1.27N-m
Velocità massima: 3000rpm
Encoder: encoder assoluto a 17 bit
Inerzia del carico JL kg¡m2¢ 10−4: 0.026
Albero: dritto senza linguetta
ALTRI PRODOTTI SUPERIORI
Motore Yaskawa, Driver SG- Motore Mitsubishi HC-,HA-
Moduli Westinghouse 1C-,5X- Emerson VE-,KJ-
Honeywell TC-,TK- Motore Fanuc A0-
Trasmettitore Rosemount 3051- Trasmettitore Yokogawa EJA-
Persona di contatto: Anna
E-mail: wisdomlongkeji@163.com
Cellulare: +0086-13534205279
Simili Prodotti
SJDE-01APA
SJDE-02APA
SJDE-04APA
SJDE-04APA+SJME-04AMB41
SJDE-08APA
SJME-01AMA41
SJME-04AMA41
SJME-04AWA41
SJME-08AWA41
L'inverter è costituito da tre unità a semiponte in cui l'interruttore superiore e inferiore sono controllati in modo complementare, il che significa che quando quello superiore è acceso, quello inferiore deve essere spento, e viceversa. Poiché il tempo di spegnimento del dispositivo di potenza è più lungo del suo tempo di accensione, è necessario inserire un certo tempo morto tra il momento in cui un transistor del semiponte viene spento e il suo dispositivo complementare viene acceso. La tensione di uscita è creata principalmente da una tecnica di modulazione di larghezza di impulso (PWM), in cui un'onda portante triangolare isoscele viene confrontata con un'onda sinusoidale modulante a frequenza fondamentale. I punti naturali di intersezione determinano i punti di commutazione dei dispositivi di potenza di un inverter a semiponte. Questa tecnica è mostrata nella Figura 3-6. Le onde di tensione trifase sono sfasate di 120° l'una rispetto all'altra e quindi è possibile alimentare un motore trifase
I dispositivi di potenza più diffusi per le applicazioni di controllo motori sono i Power MOSFET e gli IGBT. Un Power MOSFET è un transistor controllato in tensione. È progettato per il funzionamento ad alta frequenza e ha una bassa caduta di tensione, quindi ha basse perdite di potenza. Tuttavia, la sensibilità alla temperatura di saturazione limita l'uso del MOSFET nelle applicazioni ad alta potenza. Un transistor bipolare a gate isolato (IGBT) è controllato da un MOSFET sulla sua base. L'IGBT richiede una bassa corrente di pilotaggio, ha un tempo di commutazione rapido ed è adatto per alte frequenze di commutazione. Lo svantaggio è la maggiore caduta di tensione del transistor bipolare, che causa maggiori perdite di conduzione.

Il controllo vettoriale è la tecnica di controllo più diffusa per i motori a induzione CA. In sistemi di riferimento speciali, l'espressione della coppia elettromagnetica della macchina a traferro liscio è simile all'espressione della coppia della macchina CC a eccitazione separata. Nel caso delle macchine a induzione, il controllo viene solitamente eseguito nel sistema di riferimento (d-q) collegato al vettore spaziale del flusso rotorico. Ecco perché l'implementazione del controllo vettoriale richiede informazioni sul modulo e sull'angolo spaziale (posizione) del vettore spaziale del flusso rotorico. Le correnti statoriche della macchina a induzione vengono separate in componenti che producono flusso e coppia utilizzando la trasformazione nel sistema di coordinate d-q, il cui asse diretto (d) è allineato con il vettore spaziale del flusso rotorico. Ciò significa che la componente dell'asse q del vettore spaziale del flusso rotorico è sempre zero:

 Il tuo messaggio deve contenere da 20 a 3000 caratteri!
Il tuo messaggio deve contenere da 20 a 3000 caratteri!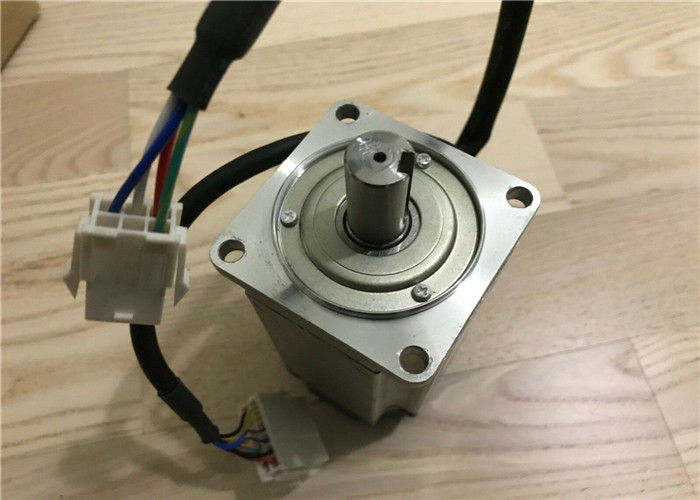
Valutazione complessiva
Valutazione Istantanea
Di seguito è riportata la distribuzione di tutte le valutazioniTutte le recensioni