Nuovo 7500W 1500RMP MOTORE-CA elettrico industriale servo SGMGH-75ACA6S di Yaskawa
Particolari dell'oggetto
Numero più probabile: SGMGH-75ACA6S
Tensione in ingresso stimata reale: 200V
Marca: YASKAWA
Tenuta della coppia di torsione: 1500
Modello: Servomotori
Impulsi per rivoluzione: Termine nominale 1000
Tensione in ingresso stimata: 200V
Corrente: 54.7A
Paese/regione di fabbricazione: Il Giappone
RPM a vuoto: 1500
Elenco del pacco: Sì
Protezione contro i solidi: Polvere protettiva
Valutazione del IP: IP65
Protezione contro i liquidi: Acqua di gocciolamento continua
Coppia di torsione: 1
SIMILI PRODOTTI
| SGMGH-03ACB61 |
| SGMGH-03ACB6C |
| SGMGH-05A2A2B |
| SGMGH-05A2A61 |
| SGMGH-05A2ASC61 |
| SGMGH-05ACA61 +SGDM-05ADA |
| SGMGH-05ACA6C |
| SGMGH-05ACC21 |
| SGMGH-09A2A21 |
| SGMGH-09ACA21 |
| SGMGH-09ACA2B |
| SGMGH-09ACA2C |
| SGMGH-09ACA61 |
| SGMGH-09ACA6B |
| SGMGH-09ACA6C |
| SGMGH-09ACB61 |
| SGMGH-09ACB6B |
| SGMGH-09PCA-AM14 |
| SGMGH-12A2B2 |
| SGMGH-12A2B21 |
| SGMGH-13A2A-YR13 |
| SGMGH-13A2A-YR23 |
| SGMGH-13A2A-YR23A |
| SGMGH-13A2A-YR24 |
| SGMGH-13ACA |
| SGMGH-13ACA21 |
| SGMGH-13ACA61 |
| SGMGH-13ACA6C |
| SGMGH-13DCA61 |
| SGMGH-1AACA61 |
| SGMGH-1EACA61 |
| SGMGH-20A2B2C |
| SGMGH-20ABA6C |
| SGMGH-20ACA61 |
| SGMGH-20ACA6B |
| SGMGH-20ACA6C |
| SGMGH-20ACB2C |
| SGMGH-20ACB61 |
| SGMGH-20D2A21 |
Installazione del servomotore
I tipi di RLS e di SGMP del servomotore possono essere installati orizzontalmente o verticalmente. Tuttavia, se il servomotore è installato in modo errato o in una posizione inadeguata, il tempo di impiego sarà accorciato o i problemi inattesi accadranno. per impedire questo, per osservare sempre le istruzioni di installazione descritte qui sotto.
Prima di installazione:
La pittura anticorrosiva è ricoperta sull'orlo dell'asse del motore. Pulisca completamente la pittura anticorrosiva facendo uso di un panno inumidito con diluente.
Il PID è stato molto più comune in controllo dei processi in cui le temperature, pressioni, necessità ecc. essere
controllato ottimamente. Il beneficio primario dal termine integrale è la riduzione di attimo di errore di stato di stabilità
gli aiuti differenziali di termine migliorare la risposta e la stabilità. La teoria è valida se una è
temperatura, pressione o posizione di controllo. Una grande differenza fra un processo tipico ha chiuso il ciclo e la a
il ciclo chiuso di posizione tipica è la dinamica o la risposta in frequenza. Non è insolito per un servo di posizionamento
per avere una larghezza di banda di 10 hertz o affinchè un ciclo trattato abbiano una larghezza di banda di 0,1 hertz. Controllo della temperatura,
la pressione, ecc. è solitamente un processo «più lento» che posizionando con i motori.
Che cosa sono le loro limitazioni?
Basso rendimento – a differenza dei motori di CC, il consumo corrente del motore passo a passo è indipendente dal carico. Disegnano il più corrente quando non stanno facendo lavoro affatto. A causa di questo, tendono ad eseguire caldo.
Coppia di torsione ad alta velocità limitata - in generale, i motori passo a passo hanno meno coppia di torsione alle alte velocità che alle velocità basse.
Alcuni steppers sono ottimizzati per la migliore prestazione ad alta velocità, ma devono essere accoppiati con
driver appropriato per raggiungere quella prestazione.
Nessun risposte – a differenza dei servomotori, la maggior parte dei steppers non hanno risposte integrali per la posizione. Sebbene il greatprecision possa essere raggiunto eseguendo “il ciclo aperto”. I commutatori di limite o i rivelatori “della casa” sono forsafety tipicamente richiesto e/o stabilire una posizione di riferimento.

Un motore passo a passo è un dispositivo elettromeccanico che converte gli impulsi elettrici in movimenti meccanici discreti. L'asse o il fuso di un motore passo a passo gira negli incrementi discreti di punto una volta elettrico
gli impulsi di comando si applicano a nella sequenza adeguata. La rotazione dei motori ha parecchie relazioni dirette a questi impulsi di input applicati. La sequenza degli impulsi applicati direttamente è collegata con la direzione di rotazione delle assi del motore. La velocità della rotazione delle assi del motore direttamente è collegata con la frequenza degli impulsi di input e la lunghezza di rotazione direttamente è collegata con il numero degli impulsi di input si è applicata.
Il motore passo a passo Advantagesand danneggia
Vantaggi
1. L'angolo di rotazione del motore è proporzionale all'impulso di input.
2. Il motore ha coppia di torsione completa alla fermata (se le bobine sono stimolate)
3. posizionamento e ripetibilità precisi di movimento poiché i buoni motori passo a passo hanno un'accuratezza di
3 – 5% di un punto e di questo errore è non cumulativo da un punto al seguente.
4. risposta eccellente ad avviare fermata/invertire.
5. molto affidabile poiché non ci sono spazzole di contatto nel motore. Di conseguenza la durata del motore dipende semplicemente dalla durata del cuscinetto.
6. La risposta di motori agli impulsi di input digitale fornisce il controllo ad anello aperto, rendente il motore più semplice
e meno costoso controllare.
7. È possibile raggiungere la rotazione sincrona molto a bassa velocità con un carico che direttamente è accoppiato al
asse.
8. una vasta gamma di velocità di rotazione possono essere realizzate poichè la velocità è proporzionale alla frequenza del
impulsi di input.
ALTRI PRODOTTI SUPERIORI
Motore di Yasakawa, motore HC-, ha dello SG Mitsubishi del driver
Moduli 1C-, 5X- Emerson VE, kJ di Westinghouse
Honeywell TC, motore A0- di TK Fanuc
Trasmettitore 3051 di Rosemount - trasmettitore EJA- di Yokogawa
Persona di contatto: Anna
Email: wisdomlongkeji@163.com
Cellulare: +0086-13534205279

 Il tuo messaggio deve contenere da 20 a 3000 caratteri!
Il tuo messaggio deve contenere da 20 a 3000 caratteri!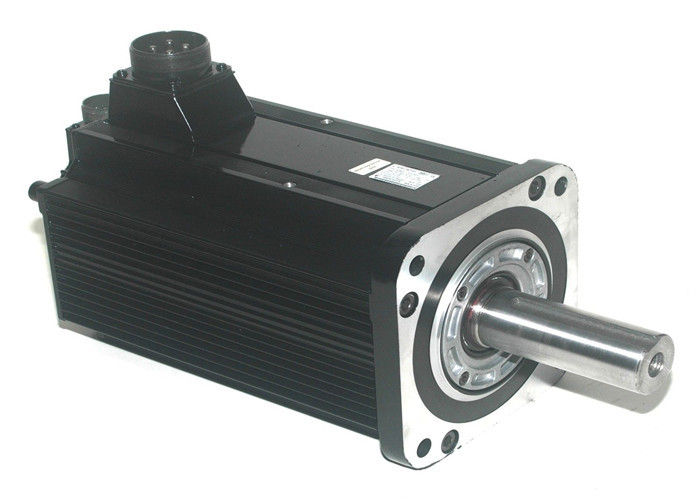
Valutazione complessiva
Valutazione Istantanea
Di seguito è riportata la distribuzione di tutte le valutazioniTutte le recensioni