Sigma industriale di Yaskawa SERVOMOTORE SGMPH-01A1A41 di CA 2 nuovo 100W di serie
DESCRIZIONE
- Yaskawa elettrico
- Servomotore di CA
- Sigma 2 (serie di Σ-II)
SEPCIFICATIONS
| Produttore |
Yaskawa/MagneTek/Saftronics/Omron |
| Serie |
Sigma 2 (serie di Σ-II) |
| Peso |
5KG |
SIMILI PRODOTTI
| SGMPH-02A1A-YR12 |
SGMPH-02A1A-YR21 |
| SGMPH-02A1A-YR31 |
SGMPH-02A1A-YR32 |
| SGMPH-02A2A-YR12 |
SGMPH-02A2A-YR21 |
| SGMPH-02AAA2B |
SGMPH-02AAA2C |
| SGMPH-02AAA2E |
SGMPH-02AAA2E |
| SGMPH-02AAA4B |
SGMPH-02AAA61 |
| SGMPH-02BAA21 |
SGMPH-02BAA41 |
| SGMPH-04A1A21 |
SGMPH-02BAAG161 |
| SGMPH-04A1A2B |
SGMPH-04A1A2C |
| SGMPH-04A1A41 |
SGMPH-04A1A4B |
Persona di contatto: Anna
Email: wisdomlongkeji@163.com
Cellulare: +0086-13534205279
ALTRI PRODOTTI SUPERIORI
| Motore di Yasakawa, SG del driver |
Motore HC-, ha di Mitsubishi |
| Moduli 1C-, 5X- di Westinghouse |
Emerson VE, kJ |
| Honeywell TC, TK |
Moduli IC di GE - |
| Motore A0- di Fanuc |
Trasmettitore EJA- di Yokogawa |
La presenza di questo alto materiale di permeabilità induce i flussi magnetici ad essere limitata generalmente ai percorsi definito dalla struttura dello statore allo stesso modo che le correnti sono limitate ai conduttori di un circuito elettronico. Ciò serve a concentrare il cambiamento continuo ai pali dello statore.
Calcoli il principio 4. di motore del magnete del disco sviluppato da Portescap.= la N LA N LA N LA N LA S la S la S 3
Figura 5. percorso dei flussi magnetici tramite un motore passo a passo del due-palo con un ritardo fra il rotore e lo statore.
Figura motori passo a passo della ferita unipolare e bipolare di 6. l'uscita di coppia di torsione prodotta dal motore è proporzionale all'intensità dei flussi magnetici generati quando la bobina è stimolata.
La relazione di base che definisce l'intensità dei flussi magnetici è definita vicino:
H = (÷ l del × di N i) dove:
N = il numero dei giri d'avvolgimento
i = corrente
H = intensità del campo magnetico
l = lunghezza del percorso dei flussi magnetici
Questa relazione indica che l'intensità dei flussi magnetici e conseguentemente la coppia di torsione è proporzionale a
il numero dei giri d'avvolgimento e del corrente ed inversamente proporzionale alla lunghezza del percorso dei flussi magnetici.
Da questa relazione di base una può vedere che lo stesso motore passo a passo di dimensione di struttura potrebbe avere capacità molto differenti dell'uscita di coppia di torsione semplicemente cambiando i parametri d'avvolgimento. Più informazione dettagliata su come i parametri d'avvolgimento colpire la capacità dell'uscita del motore possono essere trovati nella nota di applicazione intitolata «basi del circuito di azionamento».
Elementi di configurazione
() un regolatore di The del regolatore è l'ospite della rete di SynqNet. Ci dovrebbe soltanto essere un regolatore per rete.
(b) i nodi un nodo è uno schiavo e non il regolatore, salvo indicazioni contrarie.
(c) terminatore un connettore facoltativo di "loopback" disposto all'estremità di una catena di nodo in una topologia della corda.
Topologia
SynqNet sostiene una topologia dell'anello dove i nodi di rete sono collegati in serie di nuovo al regolatore di SynqNet. In una topologia dell'anello, se qualunque un cavo o nodo viene a mancare, la rete riorienterà i dati a pacchetto intorno alla rottura e notificherà l'applicazione con un evento. La posizione della rottura può essere determinata dall'applicazione.
La topologia della corda (aperta o terminata) inoltre è sostenuta dove i nodi di rete non sono collegati di nuovo al regolatore di SynqNet. Se un cavo si rompe, i nodi a valle dalla rottura più non saranno di inviare capace/ricevere i pacchetti a/dal regolatore. Il vantaggio di per mezzo di un terminatore sull'ultimo nodo è che il tempo di inizializzazione della rete è ridotto, perché il regolatore può in modo deterministico trovare l'ultimo nodo su una rete. Entrambi i tipi di topologia della corda non sostengono il recupero di errore.
Le risposte cicliche tutte le risposte cicliche sono ricevute ogni ciclo di controllo e sono disponibili nell'amplificatore di risposta di nodo.
(1) determina le manifestazioni pronte che le comunicazioni sono attive. Valido sempre.
(2) manifestazioni pronte del codificatore che il codificatore di serie sta comunicando correttamente nel modo sincrono. Valido quando la risposta pronta dell'azionamento compare.
(3) l'amp ha alimentato le manifestazioni che la tensione del motore è a disposizione per determinare il servo. Valido quando la risposta pronta dell'azionamento compare.
(4) servo sulle manifestazioni che il servo è permesso a o disabile. Non sarà messo se l'azionamento è disabile neanche girando il PWM fuori da o dal frenaggio dinamico. Valido quando l'azionamento Ready è messo.
(5) il limite di coppia di torsione indica che il riferimento di coppia di torsione è sopra il limite di coppia di torsione. Valido quando la risposta pronta dell'azionamento compare.
(6) avvertire avverte che le precauzioni devono essere prese per impedire un errore o un errore. Valido sempre.
(7) l'errore indica che un errore ha interrotto l'amplificatore. Per determinare la causa dell'errore, il codice di errore deve essere letto facendo uso di un'operazione di memoria. Valido sempre.
(8) le risposte di posizione restituiscono un valore di posizione di 32 bit ad ogni ciclo di controllo.
(9) Monitor_A/coppia di torsione Echo Shows che il valore di coppia di torsione ad ogni ciclo di controllo è restituito.
(10) Monitor_C/ritorni dati di Multi-giro un valore di dati di multi-giro di 16 bit.


 Il tuo messaggio deve contenere da 20 a 3000 caratteri!
Il tuo messaggio deve contenere da 20 a 3000 caratteri!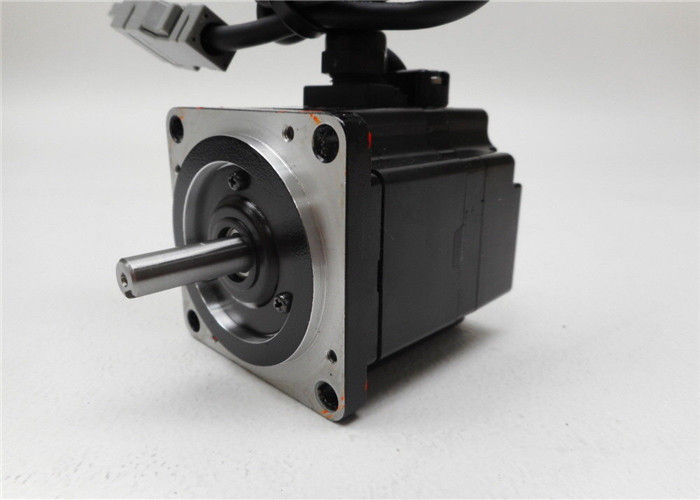
Valutazione complessiva
Valutazione Istantanea
Di seguito è riportata la distribuzione di tutte le valutazioniTutte le recensioni