Servomotore AC Yaskawa Electric Industriale 0.91A 200V Giappone SGMAH-02A1A6C
Specifiche dell'articolo
Modello SGMAH-02A1A6C
Tipo di prodotto Servomotore AC
Potenza nominale 100w
Coppia nominale 0.318 Nm
Velocità nominale 3000RPM
Tensione di alimentazione 200vAC
Corrente nominale 0.91Amp
ALTRI PRODOTTI SUPERIORI
Motore Yasakawa, Driver SG- Motore Mitsubishi HC-,HA-
Moduli Westinghouse 1C-,5X- Emerson VE-,KJ-
Honeywell TC-,TK- Motore Fanuc A0-
Trasmettitore Rosemount 3051- Trasmettitore Yokogawa EJA-
Persona di contatto: Anna
E-mail: wisdomlongkeji@163.com
Cellulare: +0086-13534205279
PRODOTTI SIMILI
SGMPH-15AAA21 SGMPH-15A1A-YR11 USAPEM-07YR23 SGM-01U3B4L
SGM-08A314S SGMAH-A3A1A4S SGMAH-02A1A4C SGMAS-01A2A41
SGMAH-A6AAA21 SGM-02VGNK13 SGMAS-A5ACA2C SGMAS-01ACA2C
SGMAS-02ACA21 SGMG-09A2A SGME-01AF14 SGM-01A314
SGMAH-01BAA4C SGM-02B314 SGMAS-06ACA2C SGMAS-07ARB-AB11
SGMAH-08A1A21 SGMG-05A2A SGMG-20A2AB SGMG-20A2A
SGMP-02B314C SGMPH-04AAA21 SGMAS-04A2A-FJ13 SGM-02U3B4L
SGM-02A314 SGMSH-20ACA21 SGMPH-15AAA-TE21 SGMPH-01AAE4CD
SGM-01AWSU12 SGM-01AGSU11 SGME-01AF14 SGM-02AGSU11
SGMP-04U314M SGMAH-04AAA-FJ12 USAREM-02CF2 USAREM-08FJ11
SGMGH-05ACA21 SGM-02U3B2L USASEM-18YR24 SGMAH-04AAAH761
SGMMJ-A3BABA1 SGMP-01U314CM SGM-01BX SGM-A3AFJ71 USAREM-02CE2KX
SGMS-55ASA SGMPH-01AAE-YA11 SGM-08AWFJ83 SGM-08AWFJ83X
SGMG-09AWAAB SGMS-15AWA-HG13 SGMG-05AWAAB SGMP-15AW16DP
USAREM-03DE2USAQEM-03-SU21 USAQEM-A6-SU31 USAQEM-05AA2KX USADEM-13-NT25
SGMP-04AS14 SGML-04AF12C SGMP-04A314E SGMPH-04A1E-TM21
SGME-04AF12 UGTMEM-03LSK21 SGM-02A612B SGMAH-A5A1A41
SGMPH-08AAA21 SGMSH-20ACA-FJ12
SGM-A5A312 SGM-A3A314 SGM-A3A321 SGMSH-15A2A21
USAREM-02CE2 SGM-02A5FJ12 SGMSH-08A1A4D SGM-08A312P
SGM-01B312 SGMAS-01A2A-AD11 SGMp-04AAA21
SGMAH-02A1F-AP11 SGMAH-A5AAA41 USAREM-03BE2KX SGMG-1AA2ABC
SGMGH-55DCA6C SGMG-30ASA SGMG-20VSAA3 SGMG-05AWAD SGMG-09ASA
SGMG-20VSR SGMG-09V2RC3 SGMG-20AWAA3 SGMG-30V2AAB SGMKS-20A3A21X2
Il servomotore è composto da tre componenti: un motore, un encoder e un driver. Il driver confronta il comando di posizionamento e le informazioni sulla posizione/velocità dall'encoder e controlla la corrente di pilotaggio. Il servomotore rileva sempre lo stato del motore con le informazioni di posizionamento/velocità dall'encoder.
Anche se il motore si ferma, il servomotore emette il segnale di allarme al controller in modo da poter rilevare le anomalie. Il servomotore deve regolare i parametri del tipo di controllo in base alla rigidità del meccanismo e alle condizioni di carico, tuttavia, la sintonizzazione automatica in tempo reale ha reso la regolazione facile negli ultimi anni.

La larghezza dell'impulso inviata al servo varia come segue:
Minimo: 1 millisecondo ---> Corrisponde a 0 angolo di rotazione.
Massimo: 2 millisecondi ---> Corrisponde a 180 angolo di rotazione.
Qualsiasi lunghezza di impulso intermedia ruoterà l'albero del servo al suo corrispondente
angolo. Ad esempio, un impulso di 1,5 ms corrisponde a un angolo di rotazione di 90 gradi.
Questo sarà spiegato nella figura sottostante.

 Il tuo messaggio deve contenere da 20 a 3000 caratteri!
Il tuo messaggio deve contenere da 20 a 3000 caratteri!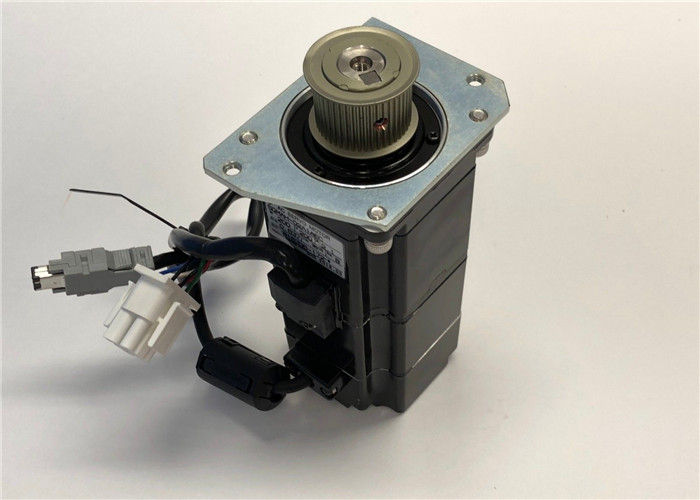
Valutazione complessiva
Valutazione Istantanea
Di seguito è riportata la distribuzione di tutte le valutazioniTutte le recensioni