SGMAH Sigma II Japan YASKAWA 0.637N.m SERVOMOTORE INsB SGMAH-02AAN21
Specifiche
Modello SGMAH-02AAN21
Tipo di prodotto Servomotore AC
Potenza nominale 200w
Coppia nominale 0.637 Nm
Velocità nominale 3000RPM
Tensione di alimentazione 200vAC
Corrente nominale 2.1Ampere
ALTRI PRODOTTI SUPERIORI
Motore Yasakawa, Driver SG- Motore Mitsubishi HC-,HA-
Moduli Westinghouse 1C-,5X- Emerson VE-,KJ-
Honeywell TC-,TK- Motore Fanuc A0-
Trasmettitore Rosemount 3051- Trasmettitore Yokogawa EJA-
SProdotti Simili
SGMAH-A5A1A21
SGMAH-A5A1A2C
SGMAH-A5A1A2E
SGMAH-A5A1A41D
SGMAH-A5A1A4C
SGMAH-A5A1A-YR11
SGMAH-A5A1A-YR31
SGMAH-A5A1F21
SGMAH-A5A1F2C
SGMAH-A5A1F2CD
SGMAH-A5A1F41
SGMAH-A5A4F41
SGMAH-A5AAA21
SGMAH-A5AAA2B
SGMAH-A5AAA61D
SGMAH-A5AAA61D-OY
SGMAH-A5AAAG161
SGMAH-A5AAAG761
SGMAH-A5AAAG761D
SGMAH-A5AAAH161
A differenza dei motori a corrente continua, con i servomotori è possibile posizionare l'albero motore in una posizione specifica (angolo) utilizzando un segnale di controllo. L'albero motore si manterrà in questa posizione finché il segnale di controllo non cambia. Questo è molto utile per controllare bracci robotici, superfici di controllo di aerei senza pilota o qualsiasi oggetto che si desidera spostare a un certo angolo e rimanere nella sua nuova posizione.
I servomotori possono essere classificati in base alle dimensioni o alla coppia che possono sopportare in mini, standard e giganti. Di solito i servomotori di dimensioni mini e standard possono essere alimentati direttamente da Arduino senza bisogno di alimentazione o driver esterni.
Di solito i servomotori sono dotati di bracci (metallo o plastica) che sono collegati all'oggetto da spostare (vedi figura in basso a destra).
Il terzo pin accetta il segnale di controllo, che è un segnale di modulazione della larghezza di impulso (PWM). Può essere facilmente prodotto da tutti i microcontrollori e schede Arduino.
Questo accetta il segnale dal tuo controller che gli dice a quale angolo girare. Il segnale di controllo è abbastanza semplice rispetto a quello di un motore passo-passo. È solo un impulso di lunghezze variabili. La lunghezza dell'impulso corrisponde all'angolo a cui il motore gira.
Diagramma a blocchi di controllo dei servomotori
Un segnale a impulsi che viene applicato esternamente (quando è il tipo di ingresso a impulsi) e la rotazione rilevata dall'encoder del servomotore vengono contati e la differenza (deviazione) viene emessa all'unità di controllo della velocità. Questo contatore è indicato come contatore di deviazione.
Durante la rotazione del motore, un impulso accumulato (deviazione di posizionamento) viene generato nel contatore di deviazione e viene controllato in modo da andare a zero.
La funzione per mantenere la posizione corrente (mantenimento della posizione tramite controllo servo) viene ottenuta con un anello di posizione (contatore di deviazione).

 Il tuo messaggio deve contenere da 20 a 3000 caratteri!
Il tuo messaggio deve contenere da 20 a 3000 caratteri!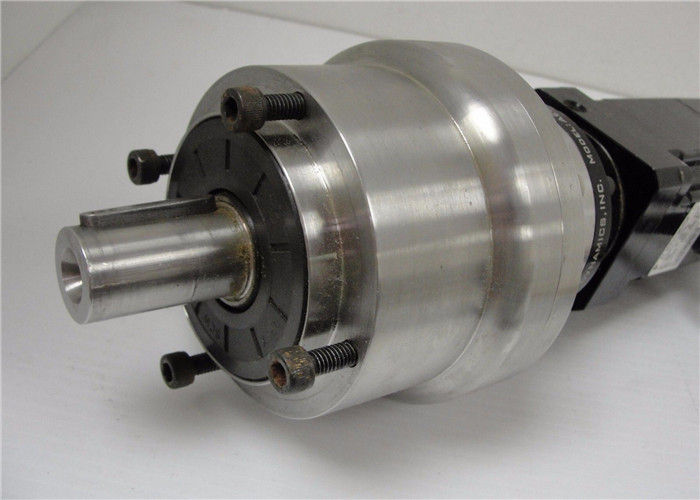
Valutazione complessiva
Valutazione Istantanea
Di seguito è riportata la distribuzione di tutte le valutazioniTutte le recensioni