YASKAWA SGMAH Sigma II 0.91A 100W AC SERVO MOTORE 3000RMP SGMAH-01AAA41-Y1
Specificità
Produttore: Yaskawa
Numero del prodotto: SGMAH-01AAA41-Y1
Descrizione: SGMAH-01AAA41-Y1 è un servo motore-AC prodotto da Yaskawa
Tipo di servomotore: SGMAH Sigma II
Potenza nominale: 10W (0,07 CV)
Fornitore di alimentazione: 200V
Specifiche del codificatore: codificatore incrementale a 13 bit (2048 x 4); standard
Livello di revisione: Standard
Specificità dell'albero: albero rettilineo senza chiave
Accessori: standard; senza freno
Opzione: nessuna
Tipo: nessuno
Altri prodotti superiori
Motor Yasakawa, autista SG- Mitsubishi Motor HC-, HA-
Moduli Westinghouse 1C, 5X- Emerson VE, KJ-
Honeywell TC-, TK- Fanuc motore A0-
Trasmettitore Rosemount 3051- Trasmettitore Yokogawa EJA-
Sprodotti imilari
SGMAH-A5A1A21
SGMAH-A5A1A2C
SGMAH-A5A1A2
SGMAH-A5A1A41D
SGMAH-A5A1A4C
SGMAH-A5A1A-YR11
SGMAH-A5A1A-YR31
SGMAH-A5A1F21
SGMAH-A5A1F2C
SGMAH-A5A1F2CD
SGMAH-A5A1F41
SGMAH-A5A4F41
SGMAH-A5AAA21
SGMAH-A5AAA2B
SGMAH-A5AAA61D
SGMAH-A5AAA61D-OY
SGMAH-A5AAAG161
SGMAH-A5AAAG761
SGMAH-A5AAAG761D
SGMAH-A5AAAH161
I motori passo a passo possono spesso mostrare un fenomeno denominato risonanza a determinate velocità di passo.Questo può essere visto come una perdita o un calo improvviso della coppia a determinate velocità che può comportare passi mancati o perdita di sincronizzazioneSi verifica quando la frequenza d'impulso del passo di ingresso coincide con la frequenza di oscillazione naturale del rotore.Spesso c'è un'area di risonanza intorno alla regione di 100 - 200 pps e anche una nella regione dell'alta frequenza di impulsoI fenomeni di risonanza di un motore passo a passo derivano dalla sua struttura di base e quindi
Infatti, non è possibile eliminarla completamente, ma dipende anche dalle condizioni di carico.
guidando il motore in modalità a metà o a micro passo.
Quando un impulso passo viene applicato a un motore passo, il rotore si comporta come definito dalla curva precedente.
Il tempo di passo t è il tempo necessario all'albero del motore per ruotare un angolo di passo una volta applicato l'impulso di primo passo.
Questo tempo di passaggio dipende molto dal rapporto tra coppia e inerzia (carico) e dal tipo di driver utilizzato.
Dal momento che la coppia è una funzione dello spostamento ne consegue che l'accelerazione lo sarà anche.quando si muove con grandi incrementi di passo si sviluppa una coppia elevata e di conseguenza un'elevata accelerazioneQuesto può causare eccessi e suono come mostrato. Il tempo di stabilizzazione T è il tempo necessario per interrompere queste oscillazioni o suono. In alcune applicazioni questo fenomeno può essere indesiderabile.È possibile ridurre o eliminare questo comportamento microstepping il motore passo. Per ulteriori informazioni sul microstep si prega di consultare la nota sul microstep.

 Il tuo messaggio deve contenere da 20 a 3000 caratteri!
Il tuo messaggio deve contenere da 20 a 3000 caratteri!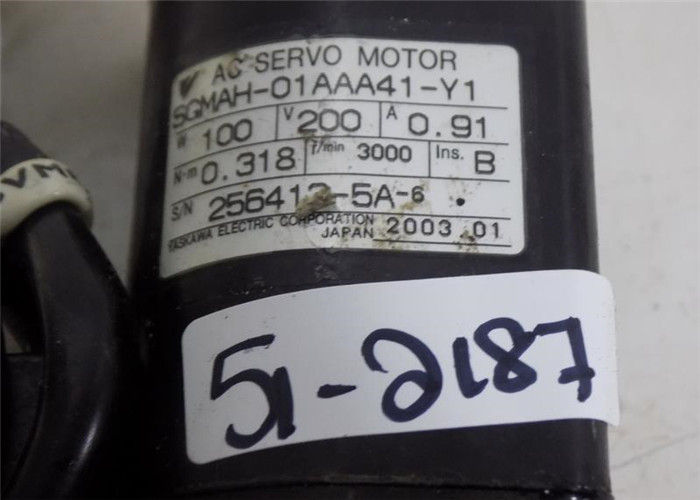
Valutazione complessiva
Valutazione Istantanea
Di seguito è riportata la distribuzione di tutte le valutazioniTutte le recensioni