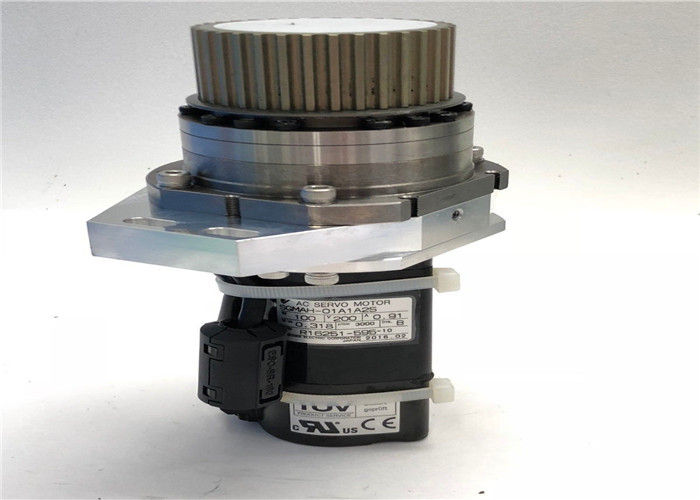
Yaskawa Electric Industrial AC Servo Motor 100W 200V 0.91A SGMAH-01A1A2S
Specificità dell'articolo
MPN: SGMAH-01A1A2S
Tensione di ingresso nominale effettiva: 200V
Marca: YASKAWA
Torsione di tenuta: 3000
Modello: Servomotori
Impulsi per rivoluzione: 1000 nominali
tensione di ingresso nominale: 200V
Corrente: 0,91A
Paese/regione di fabbricazione: Giappone
RPM senza carico: 3000
Indicazione del pacchetto: sì
Protezione contro i solidi: protezione dalla polvere
Classificazione IP: IP65
Protezione contro i liquidi: gocciolante continuo di acqua
Torsione: 1
Altri prodotti superiori
Motor Yasakawa, autista SG- Mitsubishi Motor HC-, HA-
Moduli Westinghouse 1C, 5X- Emerson VE, KJ-
Honeywell TC-, TK- Fanuc motore A0-
Trasmettitore Rosemount 3051- Trasmettitore Yokogawa EJA-
Prodotti simili
SGMPH-15AAA21 SGMPH-15A1A-YR11 USAPEM-07YR23 SGM-01U3B4L
SGM-08A314S SGMAH-A3A1A4S SGMAH-02A1A4C SGMAS-01A2A41
SGMAS-A5ACA2C SGMAS-A6AAA21 SGM-02VGNK13 SGMAS-A5ACA2C SGMAS-01ACA2C
SGMAS-02ACA21 SGMG-09A2A SGME-01AF14 SGM-01A314
SGMAH-01BAA4C SGM-02B314 SGMAS-06ACA2C SGMAS-07ARB-AB11
SGMAH-08A1A21 SGMG-05A2A SGMG-20A2AB SGMG-20A2A
SGMP-02B314C SGMPH-04AAA21 SGMAS-04A2A-FJ13 SGM-02U3B4L
SGM-02A314 SGMSH-20ACA21 SGMPH-15AAA-TE21 SGMPH-01AAE4CD
SGM-01AWSU12 SGM-01AGSU11 SGME-01AF14 SGM-02AGSU11
SGMP-04U314M SGMAH-04AAA-FJ12 USAREM-02CF2 USAREM-08FJ11
SGMGH-05ACA21 SGM-02U3B2L USASEM-18YR24 SGMAH-04AAAH761
SGMMJ-A3BABA1 SGMP-01U314CM SGM-01BX SGM-A3AFJ71 USAREM-02CE2KX
SGMS-55ASA SGMPH-01AAE-YA11 SGM-08AWFJ83 SGM-08AWFJ83X
SGMG-09AWAAB SGMS-15AWA-HG13 SGMG-05AWAAB SGMP-15AW16DP
USAREM-03DE2USAQEM-03-SU21 USAQEM-A6-SU31 USAQEM-05AA2KX USADEM-13-NT25
SGMP-04AS14 SGML-04AF12C SGMP-04A314E SGMPH-04A1E-TM21
SGME-04AF12 UGTMEM-03LSK21 SGM-02A612B SGMAH-A5A1A41
SGMPH-08AAA21 SGMSH-20ACA-FJ12
SGM-A5A312 SGM-A3A314 SGM-A3A321 SGMSH-15A2A21
USAREM-02CE2 SGM-02A5FJ12 SGMSH-08A1A4D SGM-08A312P
SGM-01B312 SGMAS-01A2A-AD11 SGMp-04AAA21
SGMAH-02A1F-AP11 SGMAH-A5AAA41 USAREM-03BE2KX SGMG-1AA2ABC
SGMGH-55DCA6C SGMG-30ASA SGMG-20VSAA3 SGMG-05AWAD SGMG-09ASA
SGMG-20VSR SGMG-09V2RC3 SGMG-20AWAA3 SGMG-30V2AAB SGMKS-20A3A21X2
Quali sono i loro limiti?
L'efficienza è bassa: a differenza dei motori a corrente continua, i motori passo-passo consumano corrente indipendente dal carico, e la maggior parte della corrente viene assorbita quando non svolgono alcun lavoro.
Torsione limitata ad alta velocità - In generale, i motori passo a passo hanno una coppia minore ad alte velocità rispetto a basse velocità.
Alcuni stepper sono ottimizzati per una migliore prestazione ad alta velocità, ma devono essere abbinati con un
il conducente appropriato per raggiungere tali prestazioni.
No Feedback A differenza dei servomotori, la maggior parte dei passoforti non ha un feedback integrale per la posizione.Gli interruttori di limite o i rivelatori "home" sono in genere necessari per la sicurezza e/o per stabilire una posizione di riferimento..

Un motore passo a passo è un dispositivo elettromeccanico che converte gli impulsi elettrici in movimenti meccanici discreti.L'albero o il mandrino di un motore passo a passo ruota in incrementi di passo discreti quando elettrico
La rotazione del motore ha diverse relazioni dirette con questi impulsi di ingresso applicati.La sequenza degli impulsi applicati è direttamente correlata alla direzione di rotazione dell'albero del motoreLa velocità di rotazione dell'albero del motore è direttamente correlata alla frequenza degli impulsi di ingresso e la lunghezza della rotazione è direttamente correlata al numero di impulsi di ingresso applicati.
Vantaggi e svantaggi del motore passo a passo
Vantaggi
1L'angolo di rotazione del motore è proporzionale all'impulso di ingresso.
2. Il motore ha la coppia massima in fermo (se gli avvolgimenti sono caricati)
3- posizionamento preciso e ripetibilità del movimento poiché i buoni motori passo a passo hanno una precisione di
L'errore non è cumulativo da un passo all'altro.
4- Ottima risposta all'avvio/arresto/ritorno.
5- molto affidabile poiché non ci sono spazzole di contatto nel motore.
6La risposta dei motori agli impulsi digitali di ingresso fornisce un controllo a circuito aperto, rendendo il motore più semplice
e meno costoso da controllare.
7È possibile ottenere una rotazione sincrona a velocità molto basse con un carico direttamente accoppiato al
- Un po' di tempo.
8Un'ampia gamma di velocità di rotazione può essere realizzata poiché la velocità è proporzionale alla frequenza del
impulsi di ingresso.

 Il tuo messaggio deve contenere da 20 a 3000 caratteri!
Il tuo messaggio deve contenere da 20 a 3000 caratteri!